ニュース:2018年8/16 6つのオポチュニティの復旧作業
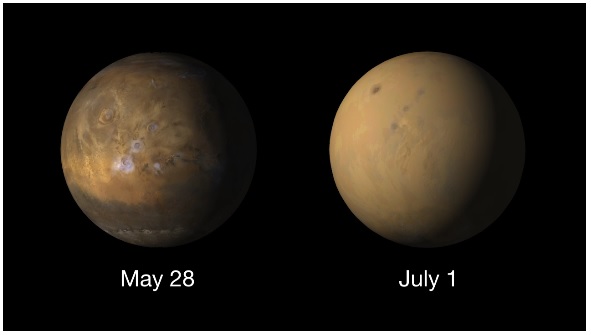
2つの並んだ動画はどのようにして砂嵐が赤い惑星を覆ってきたかを示している。
これはNASAの火星リコネッサンス・オービター(MRO)搭載の火星カラー撮像(MARCI)広角度カメラのおかげで撮れたものだ。
6/10、惑星を覆う砂嵐が約15歳のローバーのための太陽のパワーを止めてしまった。それ以来、NASAのオポチュニティ・ローバーは沈黙してきた。だが、今では広大な砂嵐が“衰退している”−多くの砂が、大気中に逆戻りする以上に、その大気外に落下していることを意味する−と科学者らは考えている。
ローバーが語りだすまでは、ローバーがどうなっているのか誰にもわからない。だが、このチームは割と楽観的だ。なぜならその理由があるからだ。
かれらは嵐の前に、そのバッテリの状態でさまざまな研究を行ってきた。嵐の前は、その場所の温度の状態も、バッテリに対して相対的に良い状態であったため、酷い劣化状態になることはなかった。さらに、砂嵐が環境温度を上げようとしたので、−2018年の嵐が起こったとき、火星上のオポチュニティの位置は夏だった−ローバーは生存のために十分な温度を維持していたはずだ。
カリフォルニア、パサデナのNASAジェット推進研究所で、技術者等は何を捜すのだろうか?−そしてこれらの兆候が復旧のために意味するものは何か?−
タウ値は2に下がった。
火星の砂嵐は、“タウ”と呼ばれる測定レベルをどんどん上げて、その表面に達する太陽光を遮ってしまう。
最高のタウ値では、太陽光を全く利用できなくなる。オポチュニティにより測定された最新の値は6/10の10.8であった。火星におけるその位置の平均的なタウ値は通常0.5である。
太陽エネルギーを得たローバーがバッテリを再充電できるまでには、オポチュニティはタウ値2.0以下を必要とするだろう、とJPLの技術者らは予測している。NASAの火星リコネサンス・オービターの広角度カメラは、空が晴れて視界が良くなれば、火星表面の地形を捕えるだろう。それはタウ値を判断する科学者らの助けになるはずだ。
1週間に数回、技術者等はNASAの深宇宙ネットワークを利用する。オポチュニティとの通信を試みるため、それは軌道上の探査機と地球の間で通信をおこなう。広範囲に及ぶDSNアンテナは予定された“目覚まし”(起動)中に、ローバーにピング(*1)し、次に、応答中のオポチュニティから送られた信号を探すのだ。
訳注:
(*1)ping(ピング):軌道上の探査機からローバーにデータ(パケット)を送って応答を待ち,
接続を確認する動作をいう。ネットワーク用語では周知。
加えて、JPLの無線科学グループは、より広い周波数を検出できるDSNアンテナの特殊な設備を使用し、
日々、ほとんどローバーの日中の間の火星からのあらゆる無線信号を記録する。その次に、録音の中からオポチュニティの“声”を探すのである。
オポチュニティがあるプログラムを実行するとき、それは自動的にその調子を維持するために動作する、いわゆる“フォールト・モード”になる。もし技術者らがオポチュニティからの返信をどうしても聞きたい場合は、3つのキー・フォールト・モードを準備する。
(1)低電力フォールト:技術者は、ローバーが6/10に通信を停止した後、しばらく低電力フォールトになったと判断している。このモードは結果としてローバーを休眠状態にする。太陽光がローバーをさらに再充電するとき、それは起動するだろう。
(2)クロック(時計)フォールト:休止している間、重要な働きをしているのはローバーの搭載時計である。もしローバーが今何時なのかわからないならば、通信すべき時が分からない。ローバーは時間について推測するため、太陽光の増大のように、環境を手がかりにすることができる。
(3)アップロス・フォールト:ローバーが長期間地球からの連絡を受けないとき、“アップロス”フォールト−通信設備が機能していないという警告−状態に入る。これを経験すると、設備の検査を開始し、地球との通信のために別の方法を試みる。
もしオポチュニティが返答したならば、どうするか?
最初に、技術者らがオポチュニティから返信を受けた後、2回目までは数週間遅れるだろう。
それはこん睡状態の病人に似ており、十分な回復には時間がかかるのだ。
技術者等が行動するための十分な情報を手にする前には、さまざまな通信セッションを要するだろう。
為すべき最初のことはローバーの状態をさらに知ることである。
オポチュニティのチームはローバーのバッテリと太陽電池の履歴を要求し、その温度を取得するはずだ。
もし時計が何時か分からなくなったならば、それはリセットされるだろう。
ローバーは、砂が敏感な部分に厚くこびりついているかどうか調べるために、自身の写真を取るはずだ。
そして、もし砂が内部に入り込んでいたり、その接続部に影響を与えるかどうかを調べるために、アクチュエータを試験する。
一旦このチームがこのデータ全てを集めたなら、それらが完全な回復を試みる準備をすることができるかどうかについて調査をする。
困難を脱していなかったら。
例え技術者らがオポチュニティからの返事を聞いたとしても、ローバーが前と同じ状態ではない、という可能性が実はある。
ローバーのバッテリは多量のパワー −さらにかなり長く非作動状態にあったため、バッテリの能力が無くなりつつある− を放電してしまった可能性がある。
もしそれらのバッテリが十分な充電を保てないなら、それはローバーの継続作業に影響を及ぼすだろう。
それは、冬の間にそのヒーターを動かすようなエネルギーの消耗が結果としてバッテリを弱くすることになる、ということを意味する。
砂は常に大きな問題というわけではない。最初の嵐はカメラのレンズに厚く積もらせたが、そのほとんどは時間と共に(自然に)落とされた。いくらか残っている砂は測定可能である。
オポチュニティに手紙を送ろう。
ローバーのチームのようにオポチュニティに会いたくないですか?
ここであなたの思いを伝えるメッセージを書けます。
オポチュニティに関するさらなる情報は次のURLを参照してください。
https://mars.nasa.gov/mer/highlights/